Projets réalisés
Du PCB sur mesure aux structures mécaniques — chaque projet combine plusieurs disciplines.
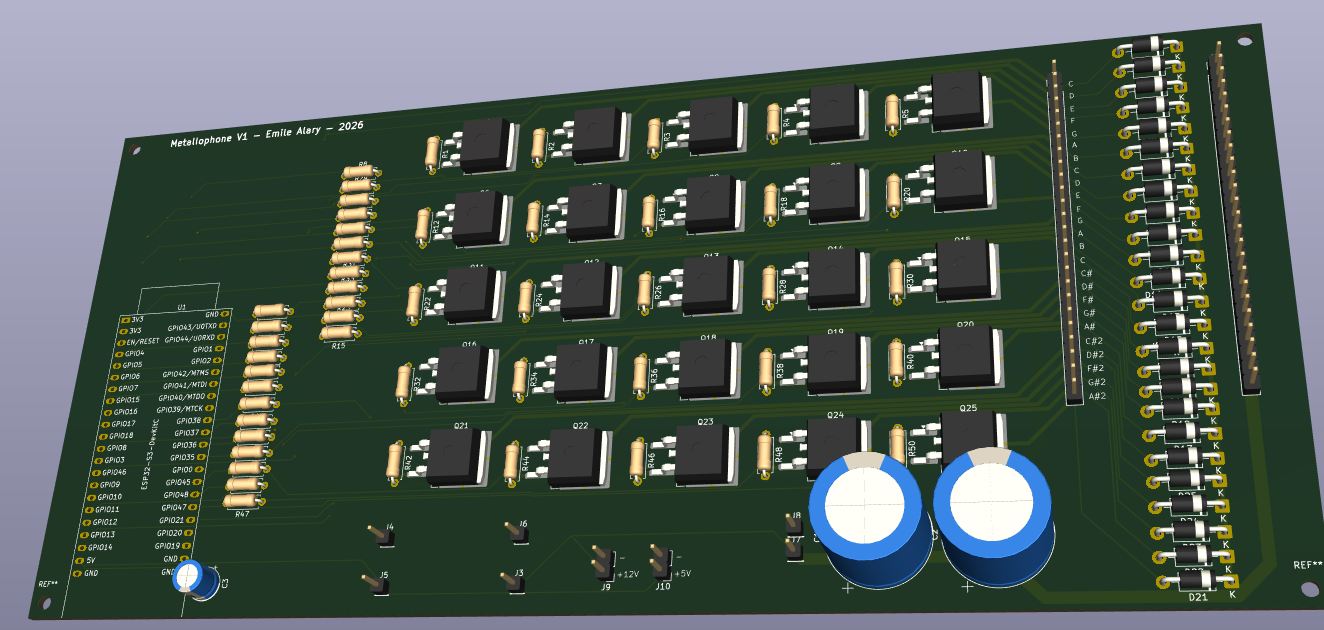
Métallophone Électrique
Conception complète d'un instrument de percussion électrique motorisé. Inclut la réalisation d'un PCB personnalisé sous KiCad (Metalophone V2 — 2026) avec ESP32, des boîtiers modélisés en 3D intégrant moteur et électronique, et une interface web de contrôle temps réel des moteurs via WebSocket.
Projet mené de la conception électronique (schéma, routage, fabrication) à l'assemblage mécanique et au développement logiciel — une réalisation entièrement autonome.
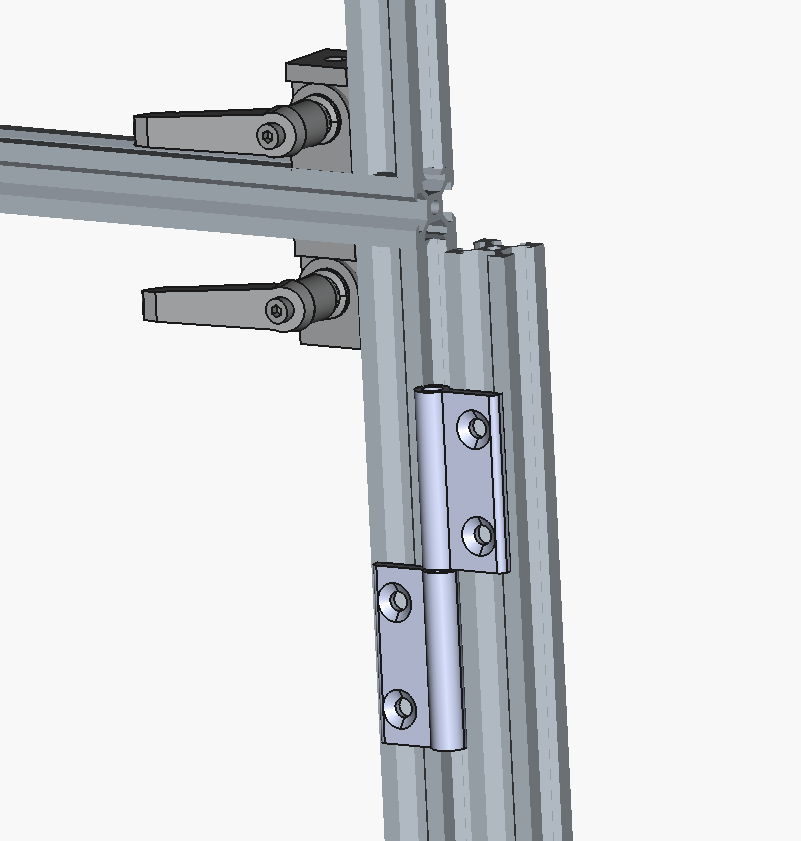
Structure Mécanique Scénique
Conception de structures modulaires scéniques : en profilés aluminium avec liaisons charnières et fixations sur mesure, ou en bois (type casier alvéolaire grande échelle). Modélisation complète sous FreeCAD, avec détails d'assemblage, tolérances et rendu dimensionné à l'échelle humaine.
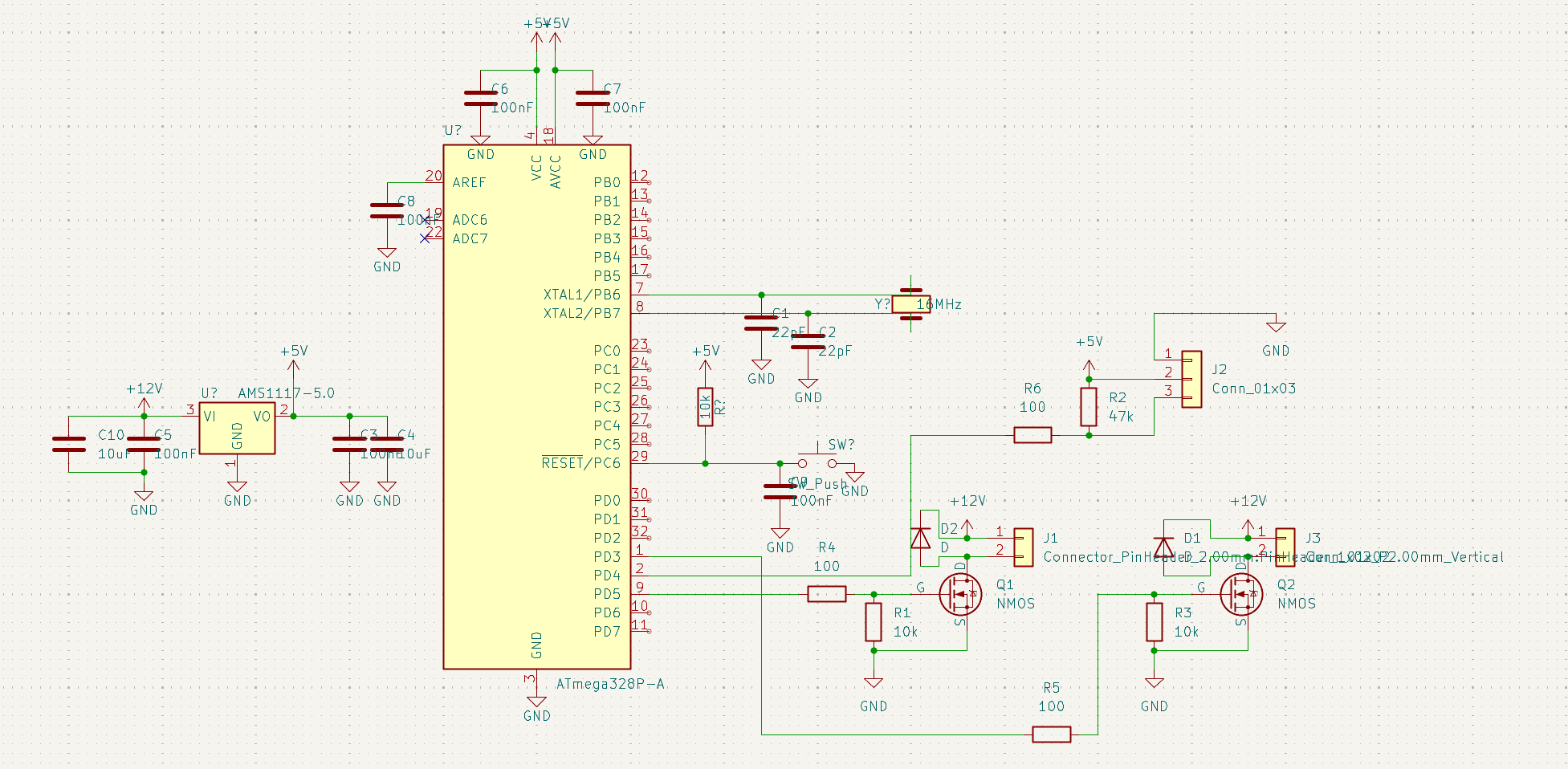
Conception de Schémas Électriques
Réalisation de schémas électriques complets sous KiCad : alimentation 12V/5V, microcontrôleur ESP32, drivers MOSFET, connecteurs d'entrées/sorties et protection de circuit. Étapes de vérification DRC et génération des fichiers Gerber.
Conception PCB Clé en Main
De la schématique à la carte physique prête à souder : conception de PCBs personnalisés sous KiCad, placement des composants, routage des pistes de puissance et de signal, validation DRC, rendu 3D et envoi en fabrication industrielle. Chaque carte est livrée testée et documentée.
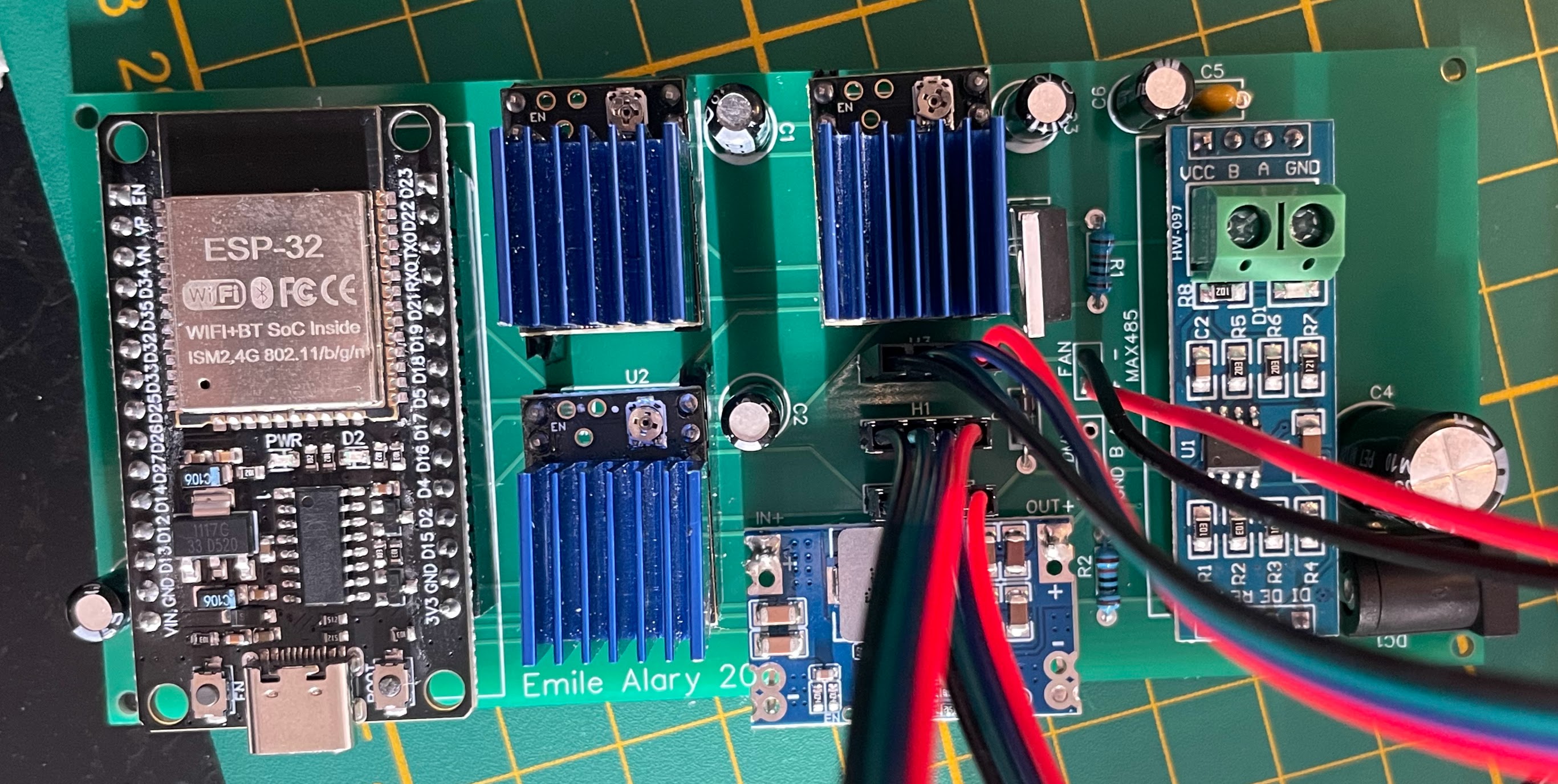
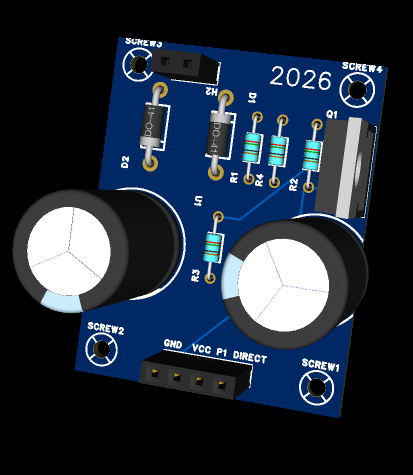
Carte de Contrôle 3 Axes
Conception et fabrication d'une carte de contrôle 3 axes sous KiCad : ESP32, trois drivers moteur avec radiateurs, connecteurs de puissance et de signal. Assemblage et câblage complets avec validation en conditions réelles.
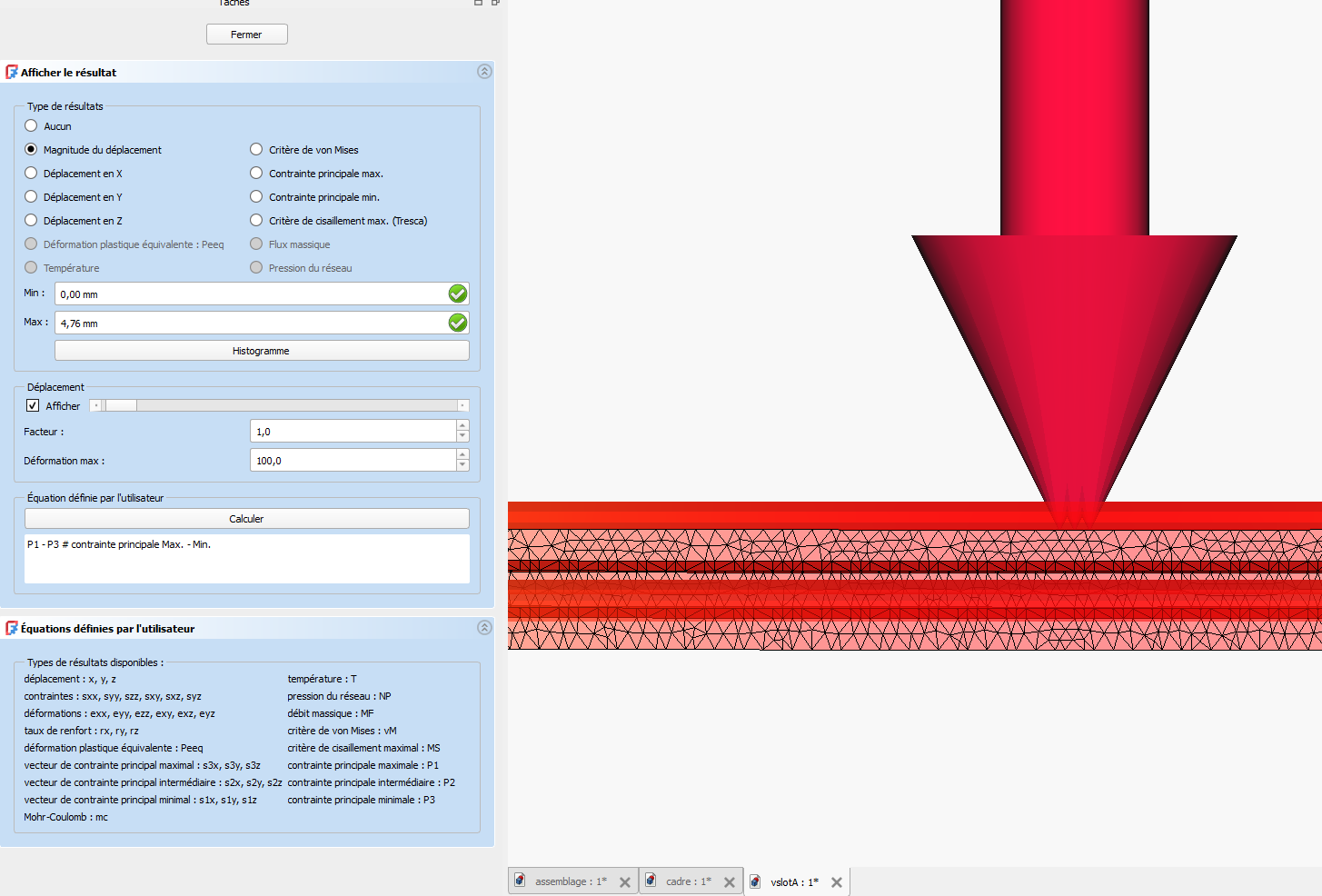
Analyse par Éléments Finis (Abaqus)
Simulation d'un essai de compression multi-couches sous Abaqus : maillage adaptatif, définition des lois matériaux, conditions aux limites et post-traitement des déplacements et contraintes.
Interface Web Temps Réel — Moteurs
Application web de chorégraphie de moteurs développée en JavaScript vanilla. Timeline interactive SVG pour créer des séquences de mouvement, playhead draggable, calibration par moteur, connexion WebSocket pour le contrôle temps réel du matériel.
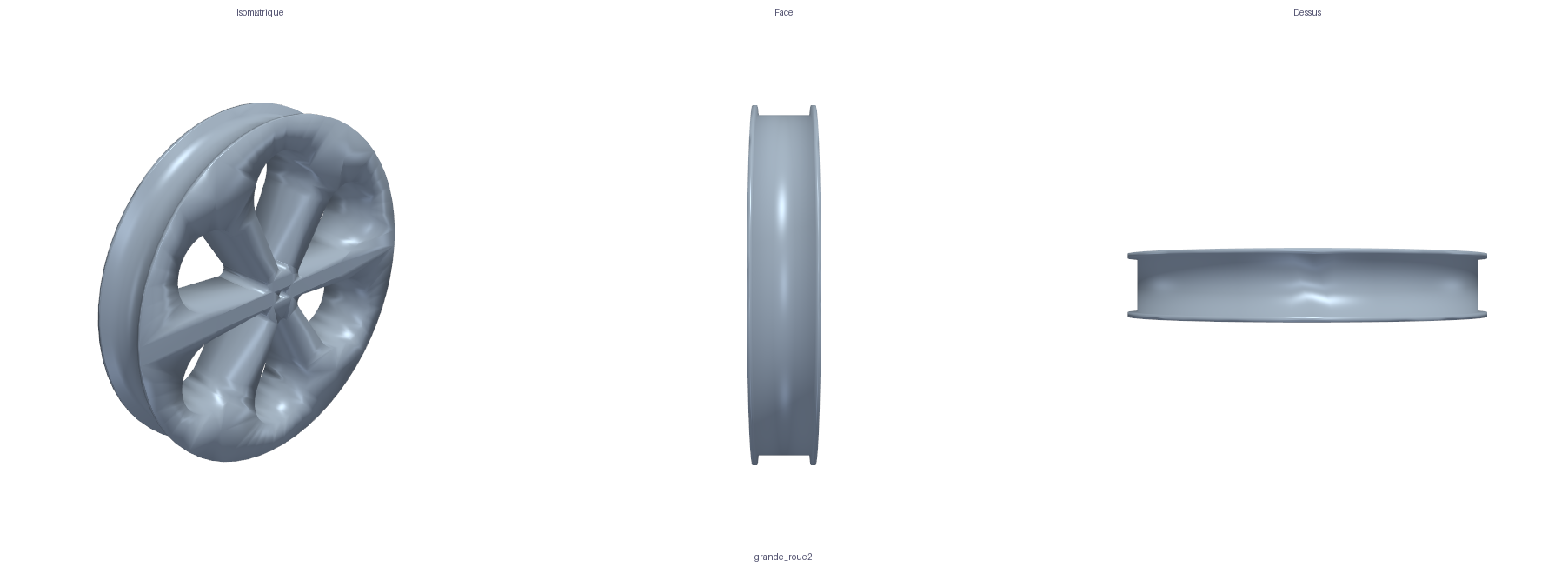
Pièces 3D sur Mesure — Bibliothèque de Composants
Conception et impression 3D de nombreuses pièces mécaniques sur mesure pour des applications variées : accessoires scéniques (support miroir Reine des Neiges, remonte-ampoule), composants mécaniques (grande roue, carter, support Arduino), et pièces de structure (table cartes, queue de rat). Maîtrise complète du workflow CAO → STL → impression → post-traitement.
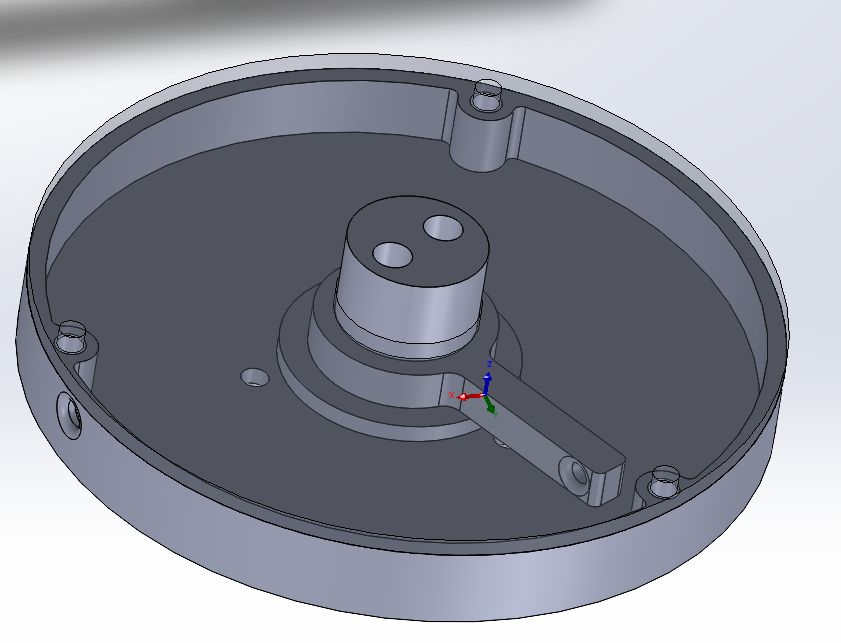
Conception Pièces Mécaniques
Modélisation de pièces mécaniques de précision sous SolidWorks : disque rotatif avec logements de centrage, cotation fonctionnelle et préparation pour fabrication (usinage ou impression). Respect des tolérances et des ajustements.
Automatisation de Tests par Bras Robotique
Stage de recherche chez IDEMIA : développement de programmes Python pour contrôler un bras robotique chargé d'automatiser des séquences de test de détection de fraude. Amélioration de la fiabilité et de la reproductibilité des tests.